MATLAB Filter Designer 工具教程(filterDesigner fdatool)
本文最后更新于:2025年12月9日 凌晨
MATLAB Filter Designer 工具教程
MATLAB 的 Filter Designer 是一个用于数字滤波器设计与分析的可视化工具,它为工程师和研究者提供了一个无需编写代码即可快速构建 FIR 和 IIR 滤波器的平台。通过该工具,用户能够直观地设置滤波器类型、截止频率、阶数、窗函数或经典模拟原型等关键参数,并实时查看幅频响应、相频响应、群延迟、零极点图等特性,从而高效完成滤波器的性能评估与优化。Filter Designer 同时支持将设计结果以滤波器对象或系数形式导出到 MATLAB 工作区,还能自动生成相应的 MATLAB 代码,便于模型复现、批处理以及集成到后续的信号处理流程中。此外,该工具还具备定点滤波器设计与量化分析能力,可用于 DSP、FPGA 等嵌入式系统的滤波器实现,是数字信号处理领域学习、实验和工程应用的重要辅助工具。
一、Filter Designer 是什么?
MATLAB 的 Filter Designer(旧称 fdatool)是一个图形化数字滤波器设计工具,可用于设计:
- FIR / IIR 滤波器
- 低通、高通、带通、带阻
- 多速率滤波器
- 幅频响应、相频响应、群延迟分析
适合信号处理、嵌入式、通信和音频工程。
二、如何打开 Filter Designer
使用命令:
1 | |
Apps → Signal Processing → Filter Designer
三、MATLAB Filter Designer 界面结构
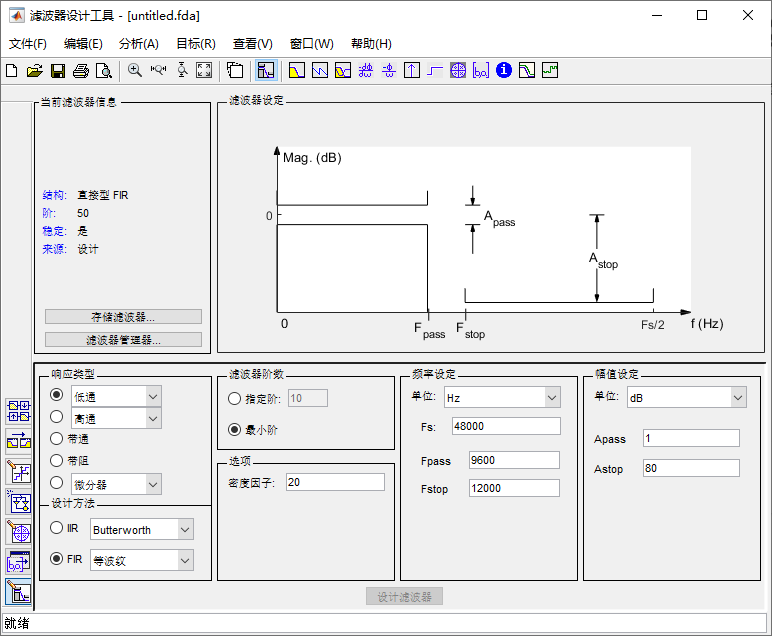
3.1 当前滤波器信息
3.1.1 滤波器的结构类型(直接型FIR)
📌 说明:
- 当前滤波器是 FIR(有限冲激响应)
- 使用最基本、最常用的 直接形式(Direct Form)实现
👉 使用意义: 这个结构会决定后续你在 MCU/DSP/FPGA 中实现滤波器的方式,尤其是一阶式、二阶式、全系数方式等。
3.1.2 当前滤波器的阶数
📌 说明:
滤波器阶数 = 数字滤波器系数的数量 - 1 例如 50 阶 FIR → 有 51 个滤波器系数(taps)
👉 使用意义:你要重点关注的参数!
- 越高阶 → 滤波器越陡峭 → 运算量越大
- FIR 阶数影响 CPU 使用率、延迟、功耗
- MCU/FPGA 中必须评估是否能跑得动
3.1.3 滤波器是否稳定
📌 对于 FIR → 一定稳定 (因为没有反馈环)
若是 IIR 就非常关键:
- 稳定:极点在单位圆内
- 不稳定:极点超出单位圆,会输出发散的震荡波形!
👉 使用意义:
如果你设计的是 IIR 滤波器,要看这里是否标“是”,否则滤波器不能用!
3.1.4 滤波器的来源
📌表示当前滤波器的来源是:
- 由你在 FilterDesigner 中设计的(Design)
- 或从 MAT 文件导入的(Import)
- 或通过 Filter Manager 替换加载的
👉 使用意义:
如果你从文件加载了其他滤波器,这里会显示来源不同,帮助你确认当前正在编辑哪一个滤波器对象。
3.1.5 【按钮】存储滤波器
📌 点击后可选择:
- 保存为 MAT 文件
- 保存为滤波器对象(dfilt / dsp.FIRFilter)
- 保存系数(b/a、SOS 等)
👉 工程中最常用的用途:
导出滤波器给 MATLAB 脚本使用
导出给 Simulink
导出给嵌入式 C 程序(生成 C 代码)
导出为 coefficient vector b[]
3.1.6 【按钮】滤波器管理器
这个按钮可以打开 Filter Manager,用于:
- 比较多个滤波器
- 并行存储多个不同设计的版本
- 选择最优响应
- 切换不同滤波器进行对比与导出
📌 工程用途非常大:
例如你设计多个:
- 不同阶数
- 不同过渡带宽
- 不同 IIR/FIR 方法
你可以存到 Filter Manager 然后逐一比较频率响应。
3.2 滤波器设定(信息展示)
对应设计滤波器必须输入的 4 类参数,同时展示:
- 采样率 Fs(因此右端是 Fs/2,也就是奈奎斯特频率)
- 纵轴是幅度(以 dB 为单位)
它帮助你理解滤波器目标的“形状”。
通带截止频率 Fpass
含义:
在这个频率之前,信号应尽量保持不衰减(保持接近 0 dB)。
通常要求:
- 通带范围内的信号变化 ≤ Apass(例如 0.5 dB 或 1 dB)
阻带起始频率 Fstop
含义:
在 Fstop 之后,信号必须被强烈衰减。
图中右边的下沉线表示阻带开始。阻带范围:
- Fstop 到 Fs/2
通带最大衰减 Apass
含义:
在通带范围内,允许的最大衰减(或纹波)。
例如:
- Apass = 1 dB → 通带幅度可以在 -1 dB 以内浮动
- Apass 越小 → 通带越平坦 → 滤波器阶数会上升
阻带最小衰减 Astop
含义:
阻带中信号必须至少衰减多少 dB。
例如:
- Astop = 40 dB → 阻带信号降低 100 倍
- Astop 越大 → 抑制越强 → 阶数会明显增加
3.3 响应类型
低通
- 升余弦
- 半带低通
- 奈奎斯特
- 反正弦低通
高通
- 半带高通
- 反正弦高通
带通
带阻
微分器
- 多频带
- Hilbert 变换器
- 任意幅值
- 任意群延迟
- 峰值
- 陷波
3.4 设计方法
3.4.1 IIR
- Butterworth
- Chebyshev I 型
- Chebyshev II 型
- 圆
- 最小 P-范数
- 约束最小 P-范数
3.4.2 FIR
- 等波纹
- 最小二乘
- 窗
- 约束最小二乘
- 复等波纹
- 最小 P-范数
- 约束等波纹
- 广义等波纹
- 约束频带等波纹
- 插值 FIR
3.5 滤波器阶数
3.5.1 ✔ 适用“指定阶数”的情况
选择 指定阶数 如果你是:
- 运行平台是 MCU(如 STM32)
- 运行在 DSP(如 TI C6000)
- 采样率高(数百 kHz ~ MHz)
- FPGA 设计需要固定资源
- 想要控制延迟
- 想要统一硬件延迟(如并行滤波器)
你可以手动试多个阶数,看是否满足频率要求。
3.5.2 ✔ 适用“最小阶数”的情况
选择 最小阶数(自动阶数)如果你是:
- 信号处理算法研究
- MATLAB 仿真优先
- PC 运行,不考虑实时性
- 对通带/阻带要求严格
- 想要尽可能好的效果
MATLAB 会返回一个满足你规格的最低阶滤波器。
阶数对滤波器的影响
| 项目 | 阶数高 | 阶数低 |
|---|---|---|
| 通带平坦度 | 好 | 差 |
| 阻带抑制 | 好 | 差 |
| 过渡带宽度 | 窄 | 宽 |
| 运算量 | 大 | 小 |
| 延迟 | 大 | 小 |
| 实时性 | 低 | 高 |
| 对 MCU/FPGA 负担 | 大 | 小 |
3.6 频率设定
在 Filter Designer 中,不同的滤波器类型(低通/高通/带通/带阻)会对应不同的频率字段:
你截图中的字段属于 微分器或 Hilbert 滤波器类,只有:
- Fs:采样频率
- Fc:截止频率(Cutoff Frequency)
而一般低通、高通等会出现:
- Fpass(通带截止)
- Fstop(阻带起始)
你这里之所以显示 Fc,是因为你选择的“响应类型”只有一个关键频率。
采样率的作用:
- 直接决定奈奎斯特频率(Fs/2 = 24000 Hz)
- 决定滤波器频率范围
- 所有频率参数都基于 Fs(包括 Fpass/Fstop/Fc)
如果你 Fs 设置错误:
- 截止点会错
- 生成完全错误的滤波器
这是最需要确保正确填写的参数。
3.7 幅值设定
Butterworth 滤波器的截止频率(Cutoff Frequency)定义为幅度下降 -3 dB 的位置。
| 特性 | FIR | IIR |
|---|---|---|
| 是否有反馈 | ❌ 无反馈 | ✅ 有反馈 |
| 是否绝对稳定 | ✅ 是 | ❌ 需分析极点 |
| 相位响应 | ⭐ 可线性相位 | ❌ 非线性相位 |
| 阶数 | 高(几十到几千) | 低(3~16 阶常见) |
| 计算量 | 大 | 小 |
| 内存占用 | 大 | 小 |
| 适用于高采样率滤波 | 差 | 优秀 |
| 实现复杂度 | 低 | 中等 |
| 实现风险 | 小 | 可能出现溢出、震荡 |
| 用于音频 | 优 | 可但会失真 |
| 用于控制系统 | 次选 | 优先选 |
| DSP 场景 | 广泛 | 高速场景常用 |
| MCU 场景 | 中 | 非常适合 |
| FPGA 场景 | 中 | 非常适合 |
| 类型 | 数字差分方程(核心) | 关键特点 |
|---|---|---|
| FIR(有限冲激响应) | 仅包含输入延迟项: |
无反馈、一定稳定、线性相位可实现 |
| IIR(无限冲激响应) | 包含输入 & 输出项:$ y[n] = {k=0}^{M} b_k x[n-k] - {k=1}^{N} a_k y[n-k] $ | 有反馈、可能不稳定、阶数低、相位非线性 |
3.8 转换结构
因为 相同的滤波器(相同的 b/a 系数)可以用不同的算法结构实现。
所有结构都会得到相同的幅频与相频响应,只是内部实现方式不同:
- 有的更稳定
- 有的需要更少的存储单元
- 有的更适合实时系统
- 有的适合 FPGA
- 有的更适合定点实现
换句话说:
结构 = 数字滤波器的内部实现方式,而不是滤波器本身。
| 类型 | 优点 | 缺点 |
|---|---|---|
| IIR/FIR Direct Form | 易懂,通用 | 高频滤波器组难以稳定 |
| SOS(二阶节) | 稳定,嵌入式常用 | 难构造滤波器组 |
| CA(耦合全通) | 自然构造互补滤波器 | 结构更复杂 |
| PC-CA(功率互补 + 耦合全通) | 完全能量保持、完美互补 | 用途专门,不适用于一般场景 |
| PC-CA Lattice(格型) | 最稳的全通滤波器实现 | 系数含义非直观 |
3.8.1 Direct-Form I, SOS(直接型 I + 二阶节)
最经典,最直观,有前馈 + 反馈两个独立延迟链。
特点:
- 两条延时链:一条用于 x,一条用于 y
- 最直观、易理解
- 更适合浮点系统(MATLAB / PC)
- 不适合定点(量化后不太稳定)
适合:
分析、验证
MATLAB 仿真
浮点 DSP
3.8.2 Direct-Form II, SOS(直接型 II + 二阶节)
最节省内存的结构(双线性合并延时)。
特点:
- 只有一个延时链(合并 x 和 y 的延时)
- 内部态变量容易溢出
- 定点实现数值不稳定风险高
- 浮点系统可用
适合:
- DSP 浮点平台
- 内存受限场景(延迟最少)
3.8.3 Direct-Form I Transposed, SOS(转置直接型 I)
数值更稳定,误差传播小。
特点:
- 对 Direct-Form I 的数值特性进行改善
- 除了滤波器输出处外,添加反馈前置
- 量化噪声传播方向更有利
- 对高阶 IIR 更稳定
适合:
- MCU
- DSP(定点/浮点)
- 稳定性优先的场景
3.8.4 Direct-Form II Transposed, SOS(转置直接型 II)
目前 MCU / DSP / FPGA 最常用的 IIR 二阶节结构。
这是业界标准的 "biquad" 结构。
特点:
- 计算效率高
- 仅需 2 个状态变量
- 稳定性优于 Direct Form II 原始结构
- 定点/浮点均适用
- 对 SOS(二阶节)非常稳定
适合:
- STM32 / DSP / ARM
- FPGA
- 高可靠实时系统
- 高阶 IIR 分解为 SOS 后逐节实现
如果用户不知道选哪个 → 99% 情况应该选“Direct-Form II Transposed, SOS”。
3.8.5 ARMA(移动自回归平均滤波器)格型
ARMA 即:
意义:
- 用于系统辨识
- 用于基于信号模型的滤波
- 通常不用于直接硬件实现
3.8.6 耦合全通(CA)格型
CA = Complex Allpass filters(复全通滤波器)。
用于:
- 相位补偿
- 高保真音频
- 变速不变调(time-scale modification)
- Hilbert 滤波器
较少用于一般工程。
3.8.7 具有功率互补(PC)输出的耦合全通(CA)格型
PC = Phase-Corrected,全通相位修正结构。
用于:
- 高级音频处理
- 语音信号质量增强
- 变速变调算法
- 精确相位操控
一般信号处理应用用不到。
3.9 转换单节(转换为二阶节)
3.9.1 单节滤波器(single-section)
就是直接用一组 完整的 b 系数(分子)与 a
系数(分母) 来表示滤波器:
1 | |
这种结构称为 Direct-Form(直接型) 或 单节结构。
3.9.2 二阶节(Second Order Section)
把一个高阶 IIR(如 6、8、10 阶)分解为多个 2 阶滤波器的串联。
例如 6 阶 IIR:
1 | |
3.9.3 为什么要用 SOS?(数值稳定性)
| 项目 | 单节(b/a 形式) | SOS(二阶节) |
|---|---|---|
| 稳定性 | ❌ 差 | ✔ 最佳 |
| 数值精度敏感性 | 高 | 低 |
| 算法结构 | Direct-form | Biquad(行业标准) |
| 嵌入式实现 | 不推荐 | ✔ 强烈推荐 |
| FPGA | 难实现 | ✔ 每节独立,可流水线 |
| MATLAB Filter Designer 默认输出 | 单节 | ✔ 默认用 SOS(IIR 时) |
数值稳定性对比(重点!)
3.9.3.1 ✔ 单节结构:
- a 系数随阶数剧烈变化
- 系数差异可能达 10⁶ 倍
- 固有病态
- 定点/浮点都风险高
- 容易出现:
- 输出爆炸
- 抖动
- 噪声放大
- 对量化敏感
尤其阶数 ≥ 4 的时候。
3.9.3.2 ✔ SOS 结构:
- 每节只有 2 阶,极点/零点成对
- 系数范围小且稳定
- 误差不累积
- 定点 / 浮点平台都可靠
- 工业标准做法
DSP、STM32、FPGA 等嵌入式实现 IIR 时,都必须用 SOS(biquad)。
3.10 FIR 数字差分方程
FIR:有限长冲激响应(长度 M+1):
- 只有输入的过去值
是 FIR 系数(taps) - 一定稳定
- 容易设计成线性相位
3.11 IIR 数字差分方程
IIR:具有反馈项:
- b_k:前馈系数
- a_k:反馈系数
- a₀ = 1(通常归一化)
四、二阶Butterworth低通滤波器设计示例
1️⃣ 设计指标
- 滤波器类型:IIR,Butterworth
- 阶数:2 阶
- 采样频率:
Fs = 1000 Hz - 截止频率:
Fc = 40 Hz(-3 dB 处)
归一化截止频率:
2️⃣ MATLAB 设计代码
1 | |
在我这边算出的系数为(保留 8 位小数):
1 | |
和你之前代码里的系数非常接近,是同一类设计结果。
3️⃣ 差分方程形式
对应的数字滤波器差分方程:
1 | |
4️⃣ C/STM32 中的直接实现示例(Direct Form I)
1 | |
如果你想用 SOS/biquad(Direct Form II
Transposed),就可以把这组 b,a 再用
tf2sos 分成一节,按我们前面聊过的 biquad 模板来写。
5️⃣ 在 Filter Designer 里的操作(GUI)
filterDesigner打开工具- 响应类型:低通
- 设计方法:IIR → Butterworth
- 滤波器阶数:选择“指定阶”,填
2 - 频率设置:
Fs = 1000,Fc = 40(或 Fpass=40) - 点击“设计滤波器(Design Filter)”
File → Export…导出b, a或 SOS 系数即可
五、二阶 IIR Notch 陷波滤波器设计示例
MATLAB 设计代码
1 | |
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!
